

1
为什么机器人需要标定?
影响机器人本体精度因素分为两大类:运动学因素——加工误差、机械公差/装配误差、减速器精度、减速器空程等;动力学因素——质量、惯性张量、摩擦力、关节柔性、连杆柔性。
机器人本体的实际精度和理论设计模型可能会存在一定的误差。为了使机器人本体达到与理论设计模型一致,提高机器人点精度和轨迹精度或者能够完全以编程设定的动作运动,机器人在装配后需要进行标定工作。
标定一般采用激光跟踪仪、拉线法、20点法等方法。于采用哪种方法,可以根据企业的资金预算、客户需求及市场定位的要求选择不同的方法。毋庸置疑的是,无论使用哪种方法,对机器人本体企业来说都是成本的增加。
2
哪种情况不需要标定?
在多数工业机器人应用中,示教再现的编程方式仍然占据主流,这要求机器人具有较好的重复定位精度,对其定位精度则要求不高。
特别是对于主要用于点到点工况的SCARA机器人,在点到点的示教类应用中:比如上下料搬运,起点和终点的位置都是示教出来的,因此对于这类应用,只要编码器、减速器精度足够高即可省去标定工作。
以爱普生G3-351mmSCARA机器人为例:机器人臂展350mm,重复定位精度±0.01,额定负载1kg,负载3kg。
表1 爱普生SCARA机器人技术参数表(图片来自官网)
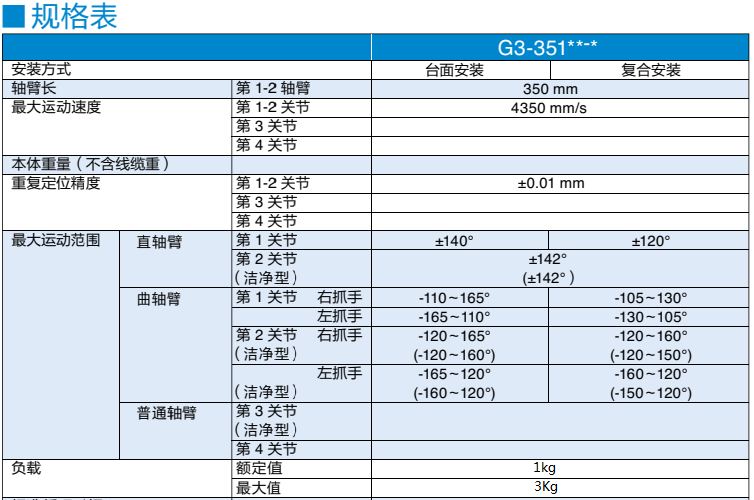
机器人本体的精度推算其对谐波减速器精度的要求,要想确保350mm臂展重复定位精度±0.01的精度,谐波减速器单向重复定位精度必须控制在11.88角秒。因此需要谐波减速器单向重复定位精度均低于10角秒。
3
国内外减速器精度对比
此前,谐波减速器作为国产机器人的“掣肘”被认为精度表现能力与国外品牌相差很大。但事实上,这两年国产谐波减速器发展迅速,甚已经在部分关键指标上已经赶超国外品牌。
如果以哈默纳克产品的标准品来作为行业标准的话。根据主流减速器厂商产品样册上的指标来看:目前国产品牌,比如绿的品牌产品14、17规格80以上减速比传动精度与哈默纳克标准品精度指标基本一致,但其他规格型号的产品却要低于哈默纳克标准品精度33%~50%。
而日本新宝品牌谐波减速器50减速比25以上规格的传动精度也低于哈默纳克标准品精度33%;但是无论标准品还是特殊品,昊志机电的传动精度均高于哈默纳克产品20%。
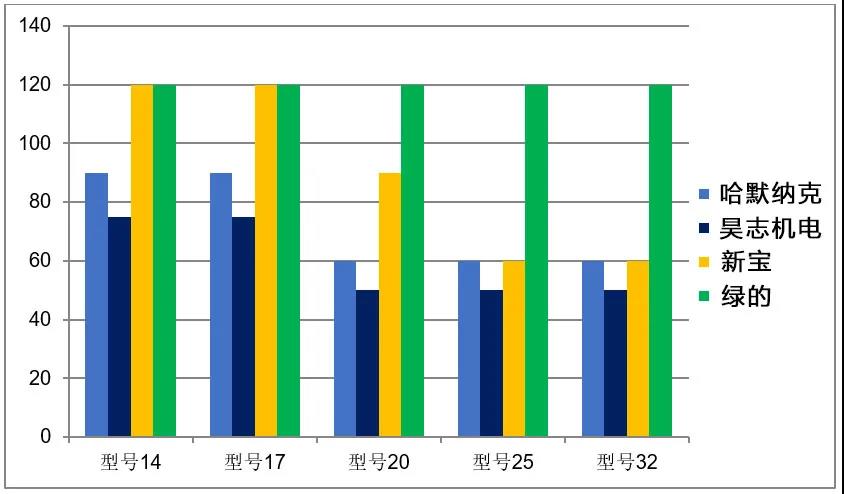
图1 减速比50标准品传动精度对比(传动精度值低为优,单位:arc sec,数据摘自厂商样册)
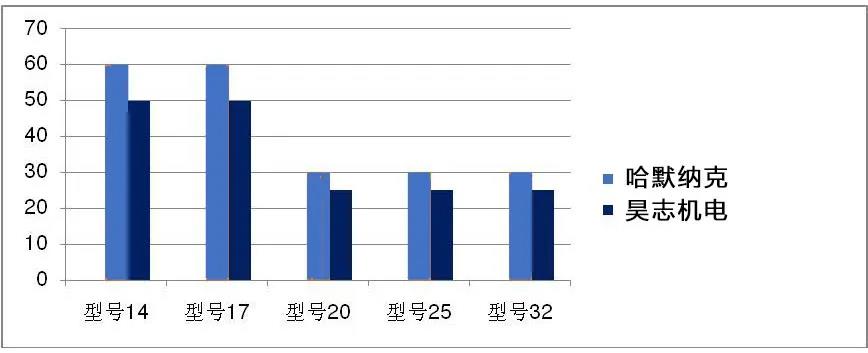
图2 减速比50特殊品传动精度对比(传动精度值低为优,单位:arc sec,数据摘自厂商样册)
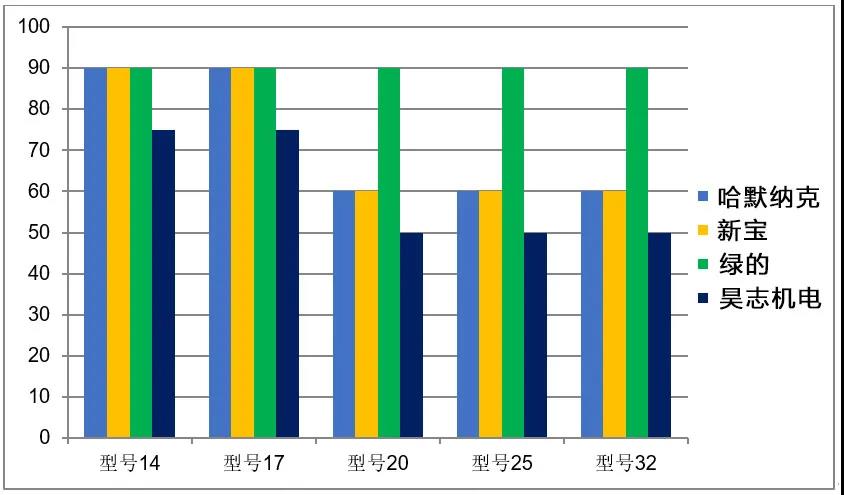
图3 减速比≥50标准品传动精度对比(传动精度值低为优,单位:arc sec,数据摘自厂商样册)
4
国内外减速器刚性性能对比
从上述影响机器人本体精度的动力学分析发现,关节柔性也是重要影响因素之一。由于谐波减速器是柔性产品,关节柔性主要表现为谐波减速器的柔性即减速器的刚性值;谐波减速器的刚性越好,机器人本体精度越高。
同样是以哈默纳科减速器刚性指标作为行业标准。可以看出:日本新宝和苏州绿的产品的刚性仅达到哈默纳克刚性标准的85%左右;而昊志机电产品刚性却为哈默纳克刚性标准的1.1倍。
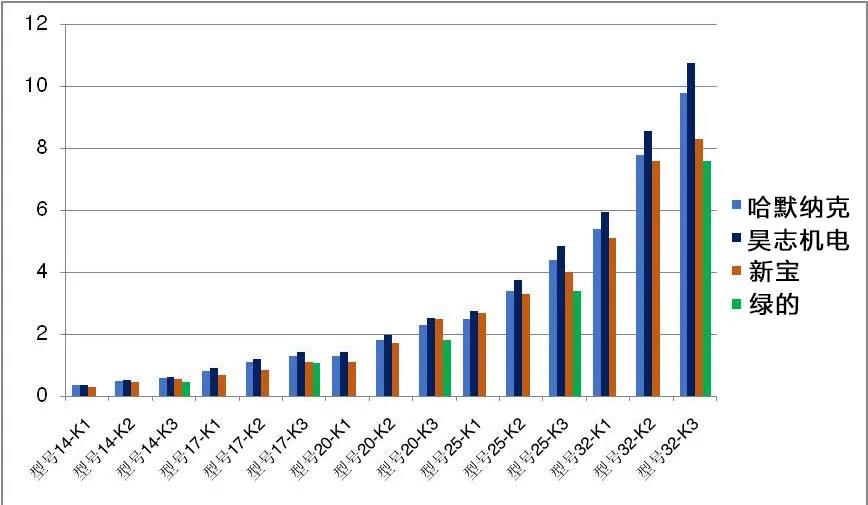
图4 减速比50刚性对比(单位:×104Nm/rad,数据摘自厂商样册)
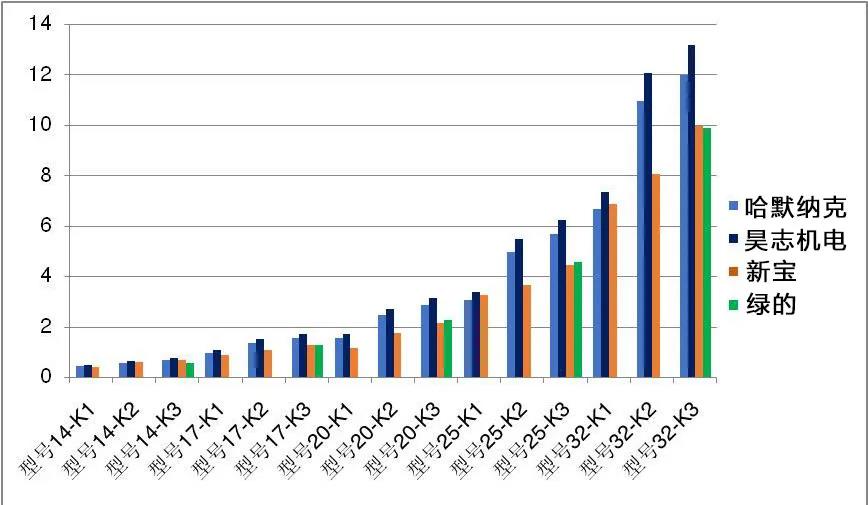
图5 减速比≥80刚性对比(单位:×104Nm/rad,数据摘自厂商样册)
未来可期,目前部分国产品牌谐波减速器产品已经达到的精度和寿。这对于SCARA细分领域大部分客户来说:在无需标定的情况下,机器人本体既可达到超高的重复定位精度要求,又能省去本体厂家的人工成本、设备采购成本及时间成本,同时本体厂家的核心竞争力。
邮箱:15236061639@163.com
QQ:60298351
微信:a18137798589

一、工业智能体发展现状(一) 工业智能体概念智能体 (AI Agent) 是指具备自主感知、自主理解

提到机器人,很多人首先想到的是工厂里的机械臂,或者像人一样行走、工作的“人形机器人”。虽然外形差异很

绳驱灵巧手的高自由度、轻量化与柔顺控制,三者都依赖于一条持续处于适度张紧状态的腱绳。腱绳一旦松弛,打

















